The 2015 school year was when I began dabbling around AI. The idea always amazed me. Everything from movie depictions of them to the real practical uses they have in modern day life was interesting, and I wanted to know more about it.
Wanting to explore Neural Networks deeper (read more about Neural Networks here), I decided to make an evolution simulator. The aim of the project was to create a population of creatures that, starting with knowing nothing about their environment, evolved to chase after food and run away from predators. The creatures can also evolve different values of attack and defense, of which determines if that creature can eat other creatures. A set of 12 creatures is allowed to survive for as long as it can (must eat food to replenish a diminishing energy value, if it gets to 0 the creature dies), and at the end of the generation, the bottom half is eliminated, the top half reproduces sexually once (2 children) with each other (first mates with second, third mates with fourth, and so on), and asexually once as well. Reproduction is accomplished with crossover/mutation, that takes into account the weights for each creatures Neural Network and the attack value for each creature. Fitness is distributed based on how many times the creature eats.
The Neural Network itself was fun to make. I decided I wanted to make an adaptable system, that is, one in which I can change whenever I want it to. This includes the size of each individual layer and the total amount of hidden layers. For this project, I got the most success using one and two hidden layers with different amount of nodes for each (18 nodes for 1 layer, 5 nodes for 2 layers).
The input for each creature is as follows: 2 ‘eyes’ that take up 4 input nodes, as well as one node expressing the current angle the creature is facing. Each eye detects the angle from the creature to the closest entity (or second closest, for the second eye) and the r, g, and b values of that entity, expressed as a fraction over 255 (the range a color value can have is [0, 255]), allowing the creature to evolve decision making based on whether the entity it sees is edible or not. The output nodes control whether it turns left or right, and its velocity forwards or backwards (move more slowly while going backwards). I used a sigmoid function (1 / (1 + e^(-x))) as my activation function.
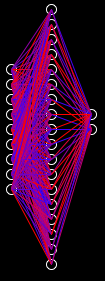
Neural Network that has 9 input nodes, 1 hidden layer with 18 nodes, and 2 output nodes. The color for each weight is explained below.
Before I go over examples of the simulation, I’ll explain what each of the graphics in the frame represent. The creatures are represented by shades of purple (creatures that have a high defense are more blue while creatures that have a high attack are more red), with the current best creature (highest fitness) is outlined in yellow. The line extending from the center from each creature to its outline is the direction in which the creature is currently facing. Food is represented by the green squares. Moving onto the panels outside the main frame, the one in the top right shows the current generation, the amount of creatures alive (from a set max population size of 12), the best fitness value from the overall simulation, the best fitness value from the previous generation, and the best fitness for the current generation (represented with O, LR, and C respectively). The graphic below that panel displays the Neural Network of the creature that garnered the best fitness, where connections that are mostly red are between (0, 1), and connections that are mostly blue are between (-1, 0). Finally, the graph displayed on the bottom of the frame illustrates the best fitness for each round and shows overall growth of the population.
At the beginning, you can observe how most creatures are spinning out of control and lack in objective.
After some time, you can see that although the creatures have not evolved the ability to go directly towards food, they have formed some structure in the way they collect it. You can also see that this population has evolved to contain creatures that have a high defense, as creatures that had a high attack in previous generations did not perform as well.
The usual ending. Creatures have evolved to not only go towards food, but to distinguish food from other creatures. That means that although an entity might be closer and thus more efficient to go towards, the creatures recognizes that entity as another creature and decides to go towards an entity that is further away because it recognizes that as food.
Although creatures tend to evolve the ability to go straight for food, there are other strategies that have the possibility to emerge. For instance, in the simulation above, the creatures have come up with the strategy to propel themselves vertically, turn horizontally, and propel themselves the left or right whenever they detect food.
This project was incredibly fun to make. Although I had some frustration at the start while learning how to make Neural Networks of varying size, it was fun finding solutions to my problems. I will probably keep working on this project for weeks or months to come, and I will definitely be utilizing my adaptive Neural Network on future projects.
If you want the source code, you can get it here (Java, 35 kb): https://drive.google.com/file/d/0Bz_0wgRmDpKqaXV0TVp0aXhIcTA/view?usp=sharing
Recent Comments